Face Generation
This tutorial was part of the projects for the Deep Learning Nanodegree at Udacity. In this project, we’ll define and trained a Deep Convolutional Generative Adversarial Networks(DCGAN) on a dataset of faces. The goal of this project is to get a generator network to generate new images of faces that look as realistic as possible. The project will be broken down into a series of tasks from loading in data to defining and training adversarial networks.
The model is trained on the CelebFaces Attributes Dataset (CelebA) 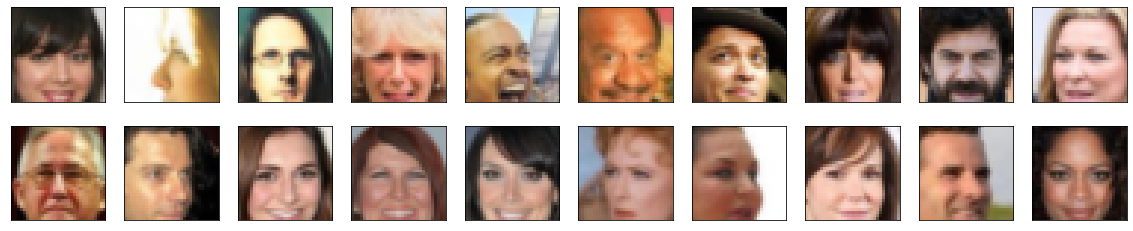
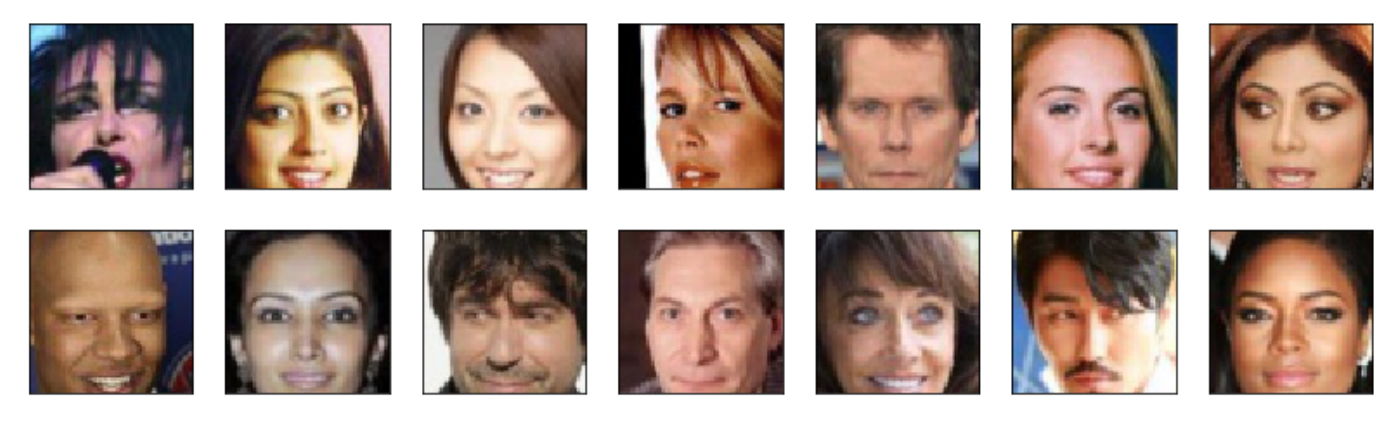
The output is new human faces such as: 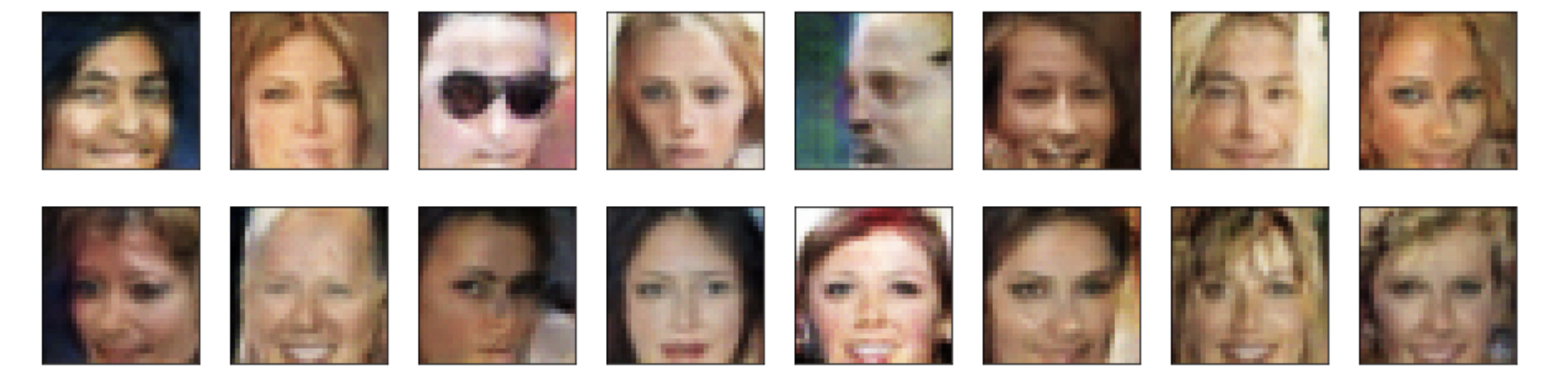
You can also clone the repo on Github
Tutorial time
We will define and train a DCGAN on a dataset of faces. Your goal is to get a generator network to generate new images of faces that look as realistic as possible!
The project will be broken down into a series of tasks from loading in data to defining and training adversarial networks. At the end of the notebook, you’ll be able to visualize the results of your trained Generator to see how it performs; your generated samples should look like fairly realistic faces with small amounts of noise.
Get the Data
You’ll be using the CelebFaces Attributes Dataset (CelebA) to train your adversarial networks.
This dataset is more complex than the number datasets (like MNIST or SVHN) you’ve been working with, and so, you should prepare to define deeper networks and train them for a longer time to get good results. It is suggested that you utilize a GPU for training.
Pre-processed Data
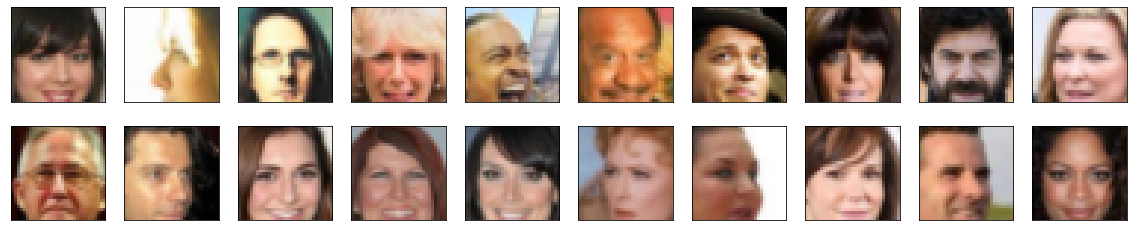
Since the project’s main focus is on building the GANs, we’ve done some of the pre-processing for you. Each of the CelebA images has been cropped to remove parts of the image that don’t include a face, then resized down to 64x64x3 NumPy images. Some sample data is show below.
If you are working locally, you can download this data by clicking here
This is a zip file that you’ll need to extract in the home directory of this notebook for further loading and processing. After extracting the data, you should be left with a directory of data processed_celeba_small/
# ignore warnings
import warnings
warnings.filterwarnings("ignore")
# can comment out after executing
!unzip processed_celeba_small.zip
unzip: cannot find or open processed_celeba_small.zip, processed_celeba_small.zip.zip or processed_celeba_small.zip.ZIP.
data_dir = 'processed_celeba_small/'
import pickle as pkl
import matplotlib.pyplot as plt
import numpy as np
import problem_unittests as tests
#import helper
%matplotlib inline
Visualize the CelebA Data
The CelebA dataset contains over 200,000 celebrity images with annotations. Since you’re going to be generating faces, you won’t need the annotations, you’ll only need the images. Note that these are color images with 3 color channels (RGB) each.
Pre-process and Load the Data
Since the project’s main focus is on building the GANs, we’ve done some of the pre-processing for you. Each of the CelebA images has been cropped to remove parts of the image that don’t include a face, then resized down to 64x64x3 NumPy images. This pre-processed dataset is a smaller subset of the very large CelebA data.
There are a few other steps that you’ll need to transform this data and create a DataLoader.
ImageFolder
To create a dataset given a directory of images, it’s recommended that you use PyTorch’s ImageFolder wrapper, with a root directory processed_celeba_small/ and data transformation passed in.
# necessary imports
import torch
from torchvision import datasets
from torchvision import transforms
def get_dataloader(batch_size, image_size, data_dir='processed_celeba_small/'):
"""
Batch the neural network data using DataLoader
:param batch_size: The size of each batch; the number of images in a batch
:param img_size: The square size of the image data (x, y)
:param data_dir: Directory where image data is located
:return: DataLoader with batched data
"""
transform = transforms.Compose([transforms.Resize(image_size),
transforms.ToTensor()])
image_dataset = datasets.ImageFolder(data_dir, transform)
return torch.utils.data.DataLoader(image_dataset, batch_size = batch_size, shuffle=True)
Create a DataLoader
Create a DataLoader celeba_train_loader with appropriate hyperparameters.
Call the above function and create a dataloader to view images.
- You can decide on any reasonable
batch_sizeparameter - Your
image_sizemust be32. Resizing the data to a smaller size will make for faster training, while still creating convincing images of faces!
# Define function hyperparameters
batch_size = 128
img_size = 32
"""
DON'T MODIFY ANYTHING IN THIS CELL THAT IS BELOW THIS LINE
"""
# Call your function and get a dataloader
celeba_train_loader = get_dataloader(batch_size, img_size)
Next, you can view some images! You should see square images of somewhat-centered faces.
Note: You’ll need to convert the Tensor images into a NumPy type and transpose the dimensions to correctly display an image, suggested imshow code is below, but it may not be perfect.
# helper display function
def imshow(img):
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
# obtain one batch of training images
dataiter = iter(celeba_train_loader)
images, _ = dataiter.next() # _ for no labels
# plot the images in the batch, along with the corresponding labels
fig = plt.figure(figsize=(20, 4))
plot_size=20
for idx in np.arange(plot_size):
ax = fig.add_subplot(2, plot_size/2, idx+1, xticks=[], yticks=[])
imshow(images[idx])
Pre-process your image data and scale it to a pixel range of -1 to 1
You need to do a bit of pre-processing; you know that the output of a tanh activated generator will contain pixel values in a range from -1 to 1, and so, we need to rescale our training images to a range of -1 to 1. (Right now, they are in a range from 0-1.)
# TODO: Complete the scale function
def scale(x, feature_range=(-1, 1)):
''' Scale takes in an image x and returns that image, scaled
with a feature_range of pixel values from -1 to 1.
This function assumes that the input x is already scaled from 0-1.'''
# assume x is scaled to (0, 1)
# scale to feature_range and return scaled x
min, max = feature_range
return x * (max -min) + min
# check scaled range
# should be close to -1 to 1
img = images[0]
scaled_img = scale(img)
print('Min: ', scaled_img.min())
print('Max: ', scaled_img.max())
Min: tensor(-0.9137)
Max: tensor(0.8745)
Define the Model
A GAN is composed of two adversarial networks, a discriminator and a generator.
Discriminator
Your first task will be to define the discriminator. This is a convolutional classifier like you’ve built before, only without any maxpooling layers. To deal with this complex data, it’s suggested you use a deep network with normalization. You are also allowed to create any helper functions that may be useful.
Complete the Discriminator class
- The inputs to the discriminator are 32x32x3 tensor images
- The output should be a single value that will indicate whether a given image is real or fake
import torch.nn as nn
import torch.nn.functional as F
def conv(in_channels, out_channels, kernel_size, stride=2, padding = 1, batch_norm= True):
layers = []
conv_layer = nn.Conv2d(in_channels=in_channels, out_channels=out_channels,
kernel_size = kernel_size, stride = stride, padding = padding, bias = False)
layers.append(conv_layer)
if batch_norm:
layers.append(nn.BatchNorm2d(out_channels))
return nn.Sequential(*layers)
class Discriminator(nn.Module):
def __init__(self, conv_dim):
"""
Initialize the Discriminator Module
:param conv_dim: The depth of the first convolutional layer
"""
super(Discriminator, self).__init__()
self.conv_dim = conv_dim
self.conv1 = conv(3, conv_dim, 4, batch_norm=False) # (16, 16, conv_dim)
self.conv2 = conv(conv_dim, conv_dim*2, 4) # (8, 8, conv_dim*2)
self.conv3 = conv(conv_dim*2, conv_dim*4, 4) # (4, 4, conv_dim*4)
self.conv4 = conv(conv_dim*4, conv_dim*8, 4) # (2, 2, conv_dim*8)
self.classifier = nn.Linear(conv_dim*8*2*2, 1)
def forward(self, x):
"""
Forward propagation of the neural network
:param x: The input to the neural network
:return: Discriminator logits; the output of the neural network
"""
# define feedforward behavior
# Leaky ReLU can have an advantage over ReLU
# https://www.reddit.com/r/MachineLearning/comments/4znzvo/what_are_the_advantages_of_relu_over_the/
out = F.leaky_relu(self.conv1(x), 0.2)
out = F.leaky_relu(self.conv2(out), 0.2)
out = F.leaky_relu(self.conv3(out), 0.2)
out = F.leaky_relu(self.conv4(out), 0.2)
out = out.view(-1, self.conv_dim*8*2*2)
out = self.classifier(out)
return out
"""
DON'T MODIFY ANYTHING IN THIS CELL THAT IS BELOW THIS LINE
"""
tests.test_discriminator(Discriminator)
Tests Passed
Generator
The generator should upsample an input and generate a new image of the same size as our training data 32x32x3. This should be mostly transpose convolutional layers with normalization applied to the outputs.
def deconv(in_channels, out_channels, kernel_size, stride=2, padding=1, batch_norm=True):
layers = []
layers.append(nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride, padding, bias=False))
if batch_norm:
layers.append(nn.BatchNorm2d(out_channels))
return nn.Sequential(*layers)
class Generator(nn.Module):
def __init__(self, z_size, conv_dim):
"""
Initialize the Generator Module
:param z_size: The length of the input latent vector, z
:param conv_dim: The depth of the inputs to the *last* transpose convolutional layer
"""
super(Generator, self).__init__()
self.conv_dim = conv_dim
self.fc = nn.Linear(z_size, conv_dim*8*2*2)
self.t_conv1 = deconv(conv_dim*8, conv_dim*4, 4)
self.t_conv2 = deconv(conv_dim*4, conv_dim*2, 4)
self.t_conv3 = deconv(conv_dim*2, conv_dim, 4)
self.t_conv4 = deconv(conv_dim, 3, 4, batch_norm=False)
def forward(self, x):
"""
Forward propagation of the neural network
:param x: The input to the neural network
:return: A 32x32x3 Tensor image as output
"""
# define feedforward behavior
out = self.fc(x)
out = out.view(-1, self.conv_dim*8, 2, 2) # (batch_size, depth, 4, 4)
out = F.relu(self.t_conv1(out))
out = F.relu(self.t_conv2(out))
out = F.relu(self.t_conv3(out))
# last layer: tanh activation instead of relu
out = self.t_conv4(out)
out = F.tanh(out)
return out
"""
DON'T MODIFY ANYTHING IN THIS CELL THAT IS BELOW THIS LINE
"""
tests.test_generator(Generator)
Tests Passed
Initialize the weights of your networks
To help your models converge, you should initialize the weights of the convolutional and linear layers in your model. From reading the original DCGAN paper, they say:
All weights were initialized from a zero-centered Normal distribution with standard deviation 0.02.
So, your next task will be to define a weight initialization function that does just this!
You can refer back to the lesson on weight initialization or even consult existing model code, such as that from the networks.py file in CycleGAN Github repository to help you complete this function.
Complete the weight initialization function
- This should initialize only convolutional and linear layers
- Initialize the weights to a normal distribution, centered around 0, with a standard deviation of 0.02.
- The bias terms, if they exist, may be left alone or set to 0.
from torch.nn import init
def weights_init_normal(m):
"""
Applies initial weights to certain layers in a model: convolutional and linear
The weights are taken from a normal distribution
with mean = 0, std dev = 0.02.
:param m: A module or layer in a network
"""
# classname will be something like:
# `Conv`, `BatchNorm2d`, `Linear`, etc.
classname = m.__class__.__name__
isConvolution = classname.find('Conv') != -1
isLinear = classname.find('Linear') != -1
if (hasattr(m, 'weight') and isConvolution or isLinear):
init.normal_(m.weight.data, 0.0, 0.02)
Build complete network
Define your models’ hyperparameters and instantiate the discriminator and generator from the classes defined above. Make sure you’ve passed in the correct input arguments.
def build_network(d_conv_dim, g_conv_dim, z_size):
# define discriminator and generator
D = Discriminator(d_conv_dim)
G = Generator(z_size=z_size, conv_dim=g_conv_dim)
# initialize model weights
D.apply(weights_init_normal)
G.apply(weights_init_normal)
print(D)
print()
print(G)
return D, G
Define model hyperparameters
# Define model hyperparams
d_conv_dim = 64
g_conv_dim = 64
z_size = 100
"""
DON'T MODIFY ANYTHING IN THIS CELL THAT IS BELOW THIS LINE
"""
D, G = build_network(d_conv_dim, g_conv_dim, z_size)
Discriminator(
(conv1): Sequential(
(0): Conv2d(3, 64, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
)
(conv2): Sequential(
(0): Conv2d(64, 128, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(conv3): Sequential(
(0): Conv2d(128, 256, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(conv4): Sequential(
(0): Conv2d(256, 512, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(classifier): Linear(in_features=2048, out_features=1, bias=True)
)
Generator(
(fc): Linear(in_features=100, out_features=2048, bias=True)
(t_conv1): Sequential(
(0): ConvTranspose2d(512, 256, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(t_conv2): Sequential(
(0): ConvTranspose2d(256, 128, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(t_conv3): Sequential(
(0): ConvTranspose2d(128, 64, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(t_conv4): Sequential(
(0): ConvTranspose2d(64, 3, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
)
)
Training on GPU
Check if you can train on GPU. Here, we’ll set this as a boolean variable train_on_gpu. Later, you’ll be responsible for making sure that
- Models,
- Model inputs, and
- Loss function arguments
Are moved to GPU, where appropriate.
import torch
# Check for a GPU
train_on_gpu = torch.cuda.is_available()
if not train_on_gpu:
print('No GPU found. Please use a GPU to train your neural network.')
else:
print('Training on GPU!')
No GPU found. Please use a GPU to train your neural network.
Discriminator and Generator Losses
Now we need to calculate the losses for both types of adversarial networks.
Discriminator Losses
- For the discriminator, the total loss is the sum of the losses for real and fake images,
d_loss = d_real_loss + d_fake_loss.
- Remember that we want the discriminator to output 1 for real images and 0 for fake images, so we need to set up the losses to reflect that.
Generator Loss
The generator loss will look similar only with flipped labels. The generator’s goal is to get the discriminator to think its generated images are real.
Exercise: Complete real and fake loss functions
You may choose to use either cross entropy or a least squares error loss to complete the following real_loss and fake_loss functions.
def real_loss(D_out):
'''Calculates how close discriminator outputs are to being real.
param, D_out: discriminator logits
return: real loss'''
batch_size = D_out.size(0)
labels = torch.ones(batch_size)
if train_on_gpu:
labels = labels.cuda()
criterion = nn.BCEWithLogitsLoss()
loss = criterion(D_out.squeeze(), labels)
return loss
def fake_loss(D_out):
'''Calculates how close discriminator outputs are to being fake.
param, D_out: discriminator logits
return: fake loss'''
batch_size = D_out.size(0)
labels = torch.zeros(batch_size)
if train_on_gpu:
labels = labels.cuda()
criterion = nn.BCEWithLogitsLoss()
loss = criterion(D_out.squeeze(), labels)
return loss
Optimizers
Define optimizers for your Discriminator (D) and Generator (G)
Define optimizers for your models with appropriate hyperparameters.
import torch.optim as optim
lr = 0.0002
beta1=0.5
beta2=0.999 # default value
# Create optimizers for the discriminator D and generator G
d_optimizer = optim.Adam(D.parameters(), lr, [beta1, beta2])
g_optimizer = optim.Adam(G.parameters(), lr, [beta1, beta2])
Training
Training will involve alternating between training the discriminator and the generator. You’ll use your functions real_loss and fake_loss to help you calculate the discriminator losses.
- You should train the discriminator by alternating on real and fake images
- Then the generator, which tries to trick the discriminator and should have an opposing loss function
Saving Samples
You’ve been given some code to print out some loss statistics and save some generated “fake” samples.
Complete the training function
Keep in mind that, if you’ve moved your models to GPU, you’ll also have to move any model inputs to GPU.
def train(D, G, n_epochs, print_every=50):
'''Trains adversarial networks for some number of epochs
param, D: the discriminator network
param, G: the generator network
param, n_epochs: number of epochs to train for
param, print_every: when to print and record the models' losses
return: D and G losses'''
# move models to GPU
if train_on_gpu:
D.cuda()
G.cuda()
# keep track of loss and generated, "fake" samples
samples = []
losses = []
# Get some fixed data for sampling. These are images that are held
# constant throughout training, and allow us to inspect the model's performance
sample_size=16
fixed_z = np.random.uniform(-1, 1, size=(sample_size, z_size))
fixed_z = torch.from_numpy(fixed_z).float()
# move z to GPU if available
if train_on_gpu:
fixed_z = fixed_z.cuda()
# epoch training loop
for epoch in range(n_epochs):
# batch training loop
for batch_i, (real_images, _) in enumerate(celeba_train_loader):
batch_size = real_images.size(0)
real_images = scale(real_images)
# ===============================================
# YOUR CODE HERE: TRAIN THE NETWORKS
# ===============================================
# 1. Train the discriminator on real and fake images
d_optimizer.zero_grad()
if train_on_gpu:
real_images = real_images.cuda()
D_real = D(real_images)
d_real_loss = real_loss(D_real)
z = np.random.uniform(-1, 1, size = (batch_size, z_size))
z = torch.from_numpy(z).float()
if train_on_gpu:
z = z.cuda()
fake_images = G(z)
D_fake = D(fake_images)
d_fake_loss = fake_loss(D_fake)
d_loss = d_real_loss + d_fake_loss
d_loss.backward()
d_optimizer.step()
# 2. Train the generator with an adversarial loss
g_optimizer.zero_grad()
z = np.random.uniform(-1, 1, size = (batch_size, z_size))
z = torch.from_numpy(z).float()
if train_on_gpu:
z = z.cuda()
fake_images = G(z)
D_fake = D(fake_images)
g_loss = real_loss(D_fake)
g_loss.backward()
g_optimizer.step()
# ===============================================
# END OF YOUR CODE
# ===============================================
# Print some loss stats
if batch_i % print_every == 0:
# append discriminator loss and generator loss
losses.append((d_loss.item(), g_loss.item()))
# print discriminator and generator loss
print('Epoch [{:5d}/{:5d}] | d_loss: {:6.4f} | g_loss: {:6.4f}'.format(
epoch+1, n_epochs, d_loss.item(), g_loss.item()))
## AFTER EACH EPOCH##
# this code assumes your generator is named G, feel free to change the name
# generate and save sample, fake images
G.eval() # for generating samples
samples_z = G(fixed_z)
samples.append(samples_z)
G.train() # back to training mode
# Save training generator samples
with open('train_samples.pkl', 'wb') as f:
pkl.dump(samples, f)
# finally return losses
return losses
Set your number of training epochs and train your GAN!
# set number of epochs
n_epochs = 2
"""
DON'T MODIFY ANYTHING IN THIS CELL
"""
# call training function
losses = train(D, G, n_epochs=n_epochs)
Epoch [ 1/ 2] | d_loss: 1.5885 | g_loss: 2.4595
Epoch [ 1/ 2] | d_loss: 0.1484 | g_loss: 5.3448
Epoch [ 1/ 2] | d_loss: 0.3365 | g_loss: 4.0576
Epoch [ 1/ 2] | d_loss: 0.2162 | g_loss: 4.7692
Epoch [ 1/ 2] | d_loss: 0.3506 | g_loss: 3.3385
Epoch [ 1/ 2] | d_loss: 0.7388 | g_loss: 5.3848
Epoch [ 1/ 2] | d_loss: 0.6447 | g_loss: 4.5798
Epoch [ 1/ 2] | d_loss: 1.0489 | g_loss: 1.5225
Epoch [ 1/ 2] | d_loss: 0.7226 | g_loss: 3.1539
Epoch [ 1/ 2] | d_loss: 0.8058 | g_loss: 1.9219
Epoch [ 1/ 2] | d_loss: 0.5621 | g_loss: 4.2040
Epoch [ 1/ 2] | d_loss: 0.7327 | g_loss: 3.2319
Epoch [ 1/ 2] | d_loss: 0.4906 | g_loss: 3.5896
Epoch [ 1/ 2] | d_loss: 0.7595 | g_loss: 2.5536
Epoch [ 1/ 2] | d_loss: 0.7745 | g_loss: 4.1521
Epoch [ 2/ 2] | d_loss: 0.9642 | g_loss: 4.7045
Epoch [ 2/ 2] | d_loss: 0.6971 | g_loss: 3.6240
Epoch [ 2/ 2] | d_loss: 0.6387 | g_loss: 4.3250
Epoch [ 2/ 2] | d_loss: 0.7282 | g_loss: 3.6856
Epoch [ 2/ 2] | d_loss: 0.7808 | g_loss: 2.7164
Epoch [ 2/ 2] | d_loss: 0.9620 | g_loss: 4.1325
Epoch [ 2/ 2] | d_loss: 0.7033 | g_loss: 4.0450
Epoch [ 2/ 2] | d_loss: 0.5007 | g_loss: 2.7120
Epoch [ 2/ 2] | d_loss: 0.8774 | g_loss: 2.0234
Epoch [ 2/ 2] | d_loss: 0.6263 | g_loss: 3.2441
Epoch [ 2/ 2] | d_loss: 0.9937 | g_loss: 1.4169
Epoch [ 2/ 2] | d_loss: 0.5905 | g_loss: 3.7324
Epoch [ 2/ 2] | d_loss: 0.5508 | g_loss: 2.3028
Epoch [ 2/ 2] | d_loss: 0.7045 | g_loss: 2.2604
Epoch [ 2/ 2] | d_loss: 0.5300 | g_loss: 3.0362
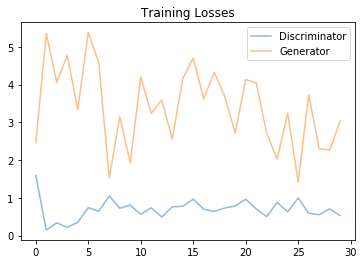
Training loss
Plot the training losses for the generator and discriminator, recorded after each epoch.
fig, ax = plt.subplots()
losses = np.array(losses)
plt.plot(losses.T[0], label='Discriminator', alpha=0.5)
plt.plot(losses.T[1], label='Generator', alpha=0.5)
plt.title("Training Losses")
plt.legend()
<matplotlib.legend.Legend at 0x12ba429e8>
Generator samples from training
View samples of images from the generator, and answer a question about the strengths and weaknesses of your trained models.
# helper function for viewing a list of passed in sample images
def view_samples(epoch, samples):
fig, axes = plt.subplots(figsize=(16,4), nrows=2, ncols=8, sharey=True, sharex=True)
for ax, img in zip(axes.flatten(), samples[epoch]):
img = img.detach().cpu().numpy()
img = np.transpose(img, (1, 2, 0))
img = ((img + 1)*255 / (2)).astype(np.uint8)
ax.xaxis.set_visible(False)
ax.yaxis.set_visible(False)
im = ax.imshow(img.reshape((32,32,3)))
# Load samples from generator, taken while training
with open('train_samples.pkl', 'rb') as f:
samples = pkl.load(f)
_ = view_samples(-1, samples)
Recommended next steps – improvements
Increase number of epochs. I only run 2 because I was on CPU.
Create a deep model and use it to generate larger (say 128×128) images of faces.
Read existing literature to see if you can use padding and normalization techniques to generate higher-resolution images.
Implement a learning rate that evolves over time as they did in this https://github.com/junyanz/pytorch-CycleGAN-and-pix2pix
See if you can extend this model and use a CycleGAN to learn to swap different kinds of faces. For example, learn a mapping between faces that have and do not have eye/lip makeup, as they did in https://gfx.cs.princeton.edu/pubs/Chang_2018_PAS/Chang-CVPR-2018.pdf
Leave a Reply